





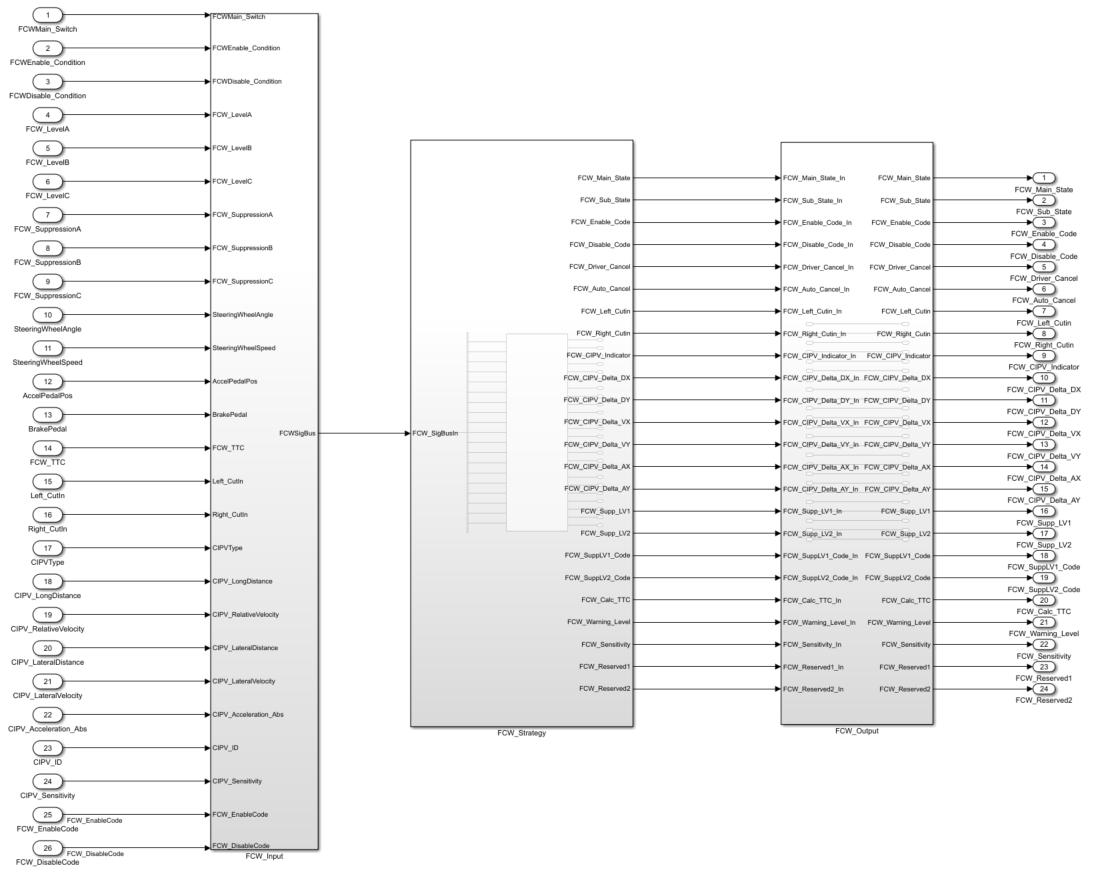
FCW模块是指前撞预警控制模块,本模块算法为Simulink模型,供开发者学习交流。此模块的主要框架与LDW模块类似,包括输入子模块、决策子模块和输出子模块等。输入子模块的功能为接受和处理车载传感器和本车的输入信息并传至决策子模块;决策子模块的功能为整合输入子模块提供的信息,通过本车状态和传感器信息来决策是否有潜在的碰撞危险并最终决定是否需要报警;输出子模块的功能为接受和传输决策层的决策信号,在调试过程中可以对输出信息进行标定。以下附件是FCW功能模块源代码,相关功能规范说明链接为:智能辅助驾驶系统之FCW和PCW(1);智能辅助驾驶系统之FCW和PCW(2)。

.png)



 回到顶部
回到顶部




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 下载
下载
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接

















