




前撞预警系统FCW(Forward Collision Warning)是通过车载安全保障感知系统提供的传感器来检测本车行驶路径前方的车辆,测算本车与前车之间的距离、方位及相对速度等关键信息,通过对关键信息的评估判断当前车辆与前方车辆之间是否有碰撞危险。当存在潜在碰撞危险时FCW系统将对驾驶员进行警告。FCW功能可降低追尾事故的发生率。FCW可发出的预警类型包括:视觉预警、声音预警及触感预警;另外FCW可以根据危险程度不同发出不同等级的报警。

车辆识别
行人碰撞预警PCW(Pedestrian Collision Warning)功能是通过车载传感器来检测本车前方视野范围内的行人,并对行人的行动路线做出预估,同时测算本车与行人之间的距离、方位及相对速度等关键信息,通过对关键信息的评估判断当前车辆与前方行人之间是否有碰撞危险。当存在潜在碰撞危险时PCW功能将对驾驶员进行警告,但PCW系统本身不会采取任何制动措施去避免碰撞或控制车辆。PCW可以识别各种工况的行人,如迎面、侧面、背面、四季不同衣着、举着雨伞等等,并给行人目标距离以及预计碰撞危险等级;PCW可以发出的报警类型包括:视觉预警、声音预警和触感预警等。

行人识别
FCW系统实质上是将车辆和周围驾驶环境实时信息采集起来,从而能够对汽车的行驶状态进行判别,并把响应的行驶状态信息发给驾驶员,并辅助驾驶员安全驾驶汽车,确保驾驶员在特殊情况下不能进行正常驾驶的同事自动实现对汽车的控制,以保护汽车和驾驶员安全。作为核心的安全距离模型一般分为三个阶段:安全行驶距离,提醒报警距离和紧急辅助制动距离(AEB功能范畴)。在进入提醒报警距离后,系统的报警模块会进行报警提醒驾驶员注意,驾驶员采取相应措施恢复到安全距离之后,停止报警。报警提醒距离应该给予驾驶员充足的反应时间,并能够进行正确的习惯操作。
FCW(PCW)算法的设计基于一个无量纲的警告值:
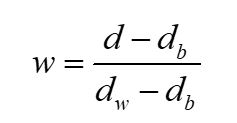
式中,各字母所代表的含义如下:


FCW(PCW)算法逻辑状态图
本文介绍了FCW和PCW系统功能描述、基本算法框架及算法逻辑状态等内容,以供读者参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















