




一、 概述
在控制系统算法开发中,需要对于某些重要信号做限制处理,对于限制条件恢复后,信号怎么输出的选择上也有多种选择,比如限制条件满足,对输出信号作限制,限制条件恢复,输出信号立即恢复为正常值;或者限制条件恢复,输出信号按照一定的梯度逐渐恢复至正常值等等。
具体选用哪种处理方式,取决于具体算法需求。之前的文章中详细介绍过用Simulink基本模块建模以及仿真验证的方法,本文就以上第二种信号处理方式,通过Simulink的状态流state flow来建模以及仿真验证。
二、 Simulink状态流State Flow
根据以往的汽车电控软件开发经验,以整车跛行(整车出现故障,需要进行限速)扭矩限制搭建了如下图的Simulink的状态流state flow算法模型:
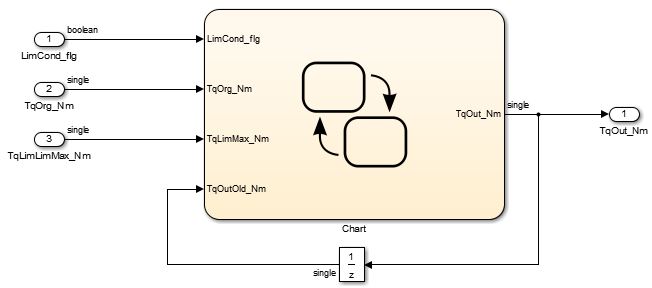
模型输入信号说明:
LimCond_flg:信号限制条件
TqOrg_Nm:原始输入扭矩
TqLimMax_Nm:限制最大扭矩
模型输出信号说明:
TqOut_Nm:输出扭矩 模型参数说明:
TqStepInc_Nm:递增扭矩
Chart由三个状态组成,具体如下:
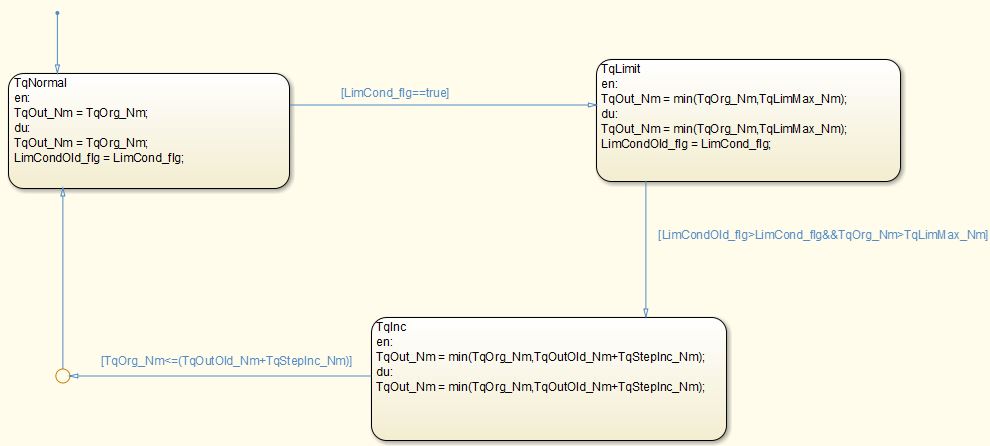
算法说明:
TqNormal状态
进入条件:上电默认状态或者TqInc状态跳出条件满足
处理:TqOut_Nm=TqOrg_Nm,并记录LimCond_flg上一次状态LimCondOld_flg=LimCond_flg
TqLimit状态
进入条件:LimCond_flg为TRUE
处理:TqOut_Nm=min(TqOrg_Nm,TqLimMax_Nm)
TqInc状态
进入条件:检测到LimCond_flg 下降沿LimCondOld_flg>LimCond_flg 且TqOrg_Nm>TqLimMax_Nm
处理:TqOut_Nm=Min(TqOrg_Nm,TqOut_Nm+TqStepInc_Nm)
跳出条件:当输出扭矩增加到大于或等于输入原始扭矩,也即:TqOrg_Nm<=(TqOutOld_Nm+TqStepInc_Nm)
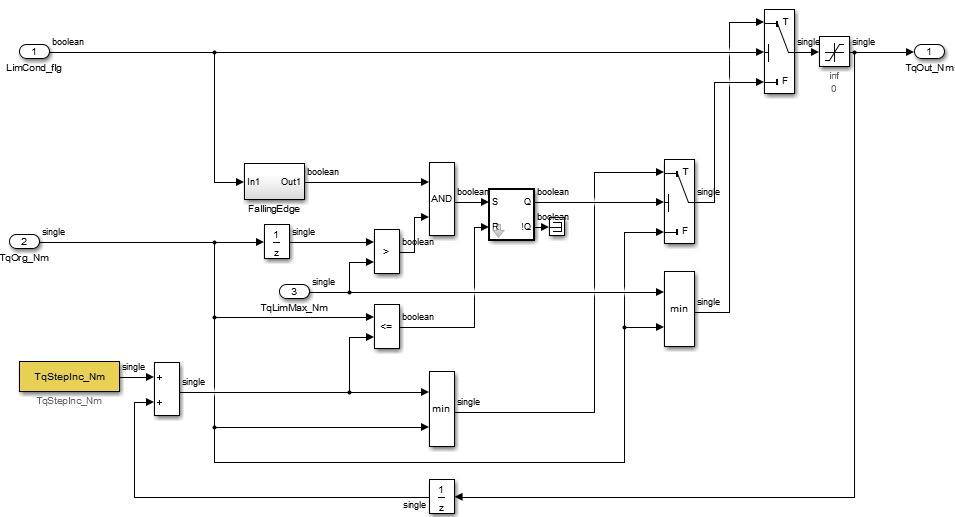
通过三个状态转移的方法,实现了原来由Simulink基本模块搭建,逻辑看起来略显复杂,且要通过S-R触发器才能锁存状态的逻辑,如下图:
三、 算法仿真验证
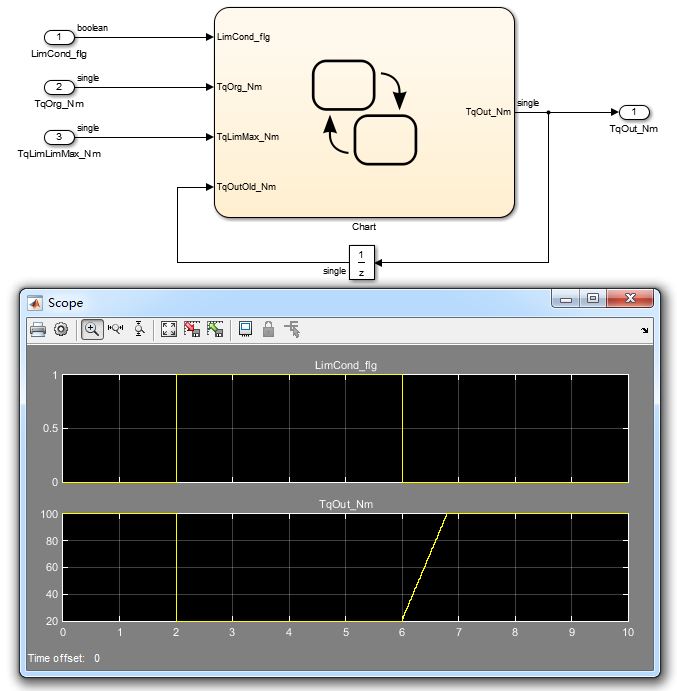
仿真模型:

如上的仿真模型中,给定同样的输入激励:
1) 通过Signal Builder模块给定LimCond_flg,0s~2s为0,2s~6s为1,6s以后为0
2) 通过Constant模块给定TqOrg_Nm为100
3) 通过Constant模块给定TqLimMax_Nm为20
4) 给定TqStepInc_Nm为1
5) 设置离散求解器,仿真步长为0.01s,仿真时长为10s
仿真结果:
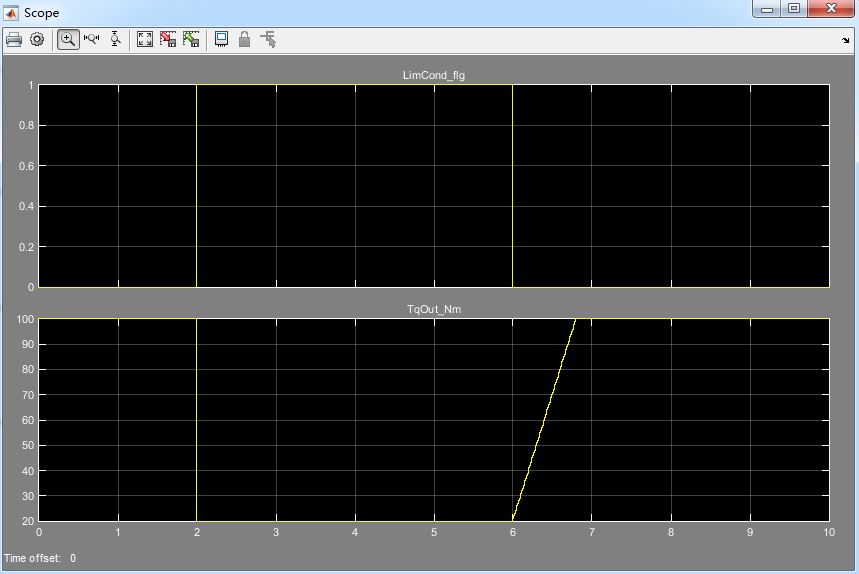
仿真结果分析如下:
1)0s~2s,TqOut_Nm为原始输入扭矩100,符合需求
2)2s,TqOut_Nm为限制最大扭矩20,符合需求
3)2s~6s,TqOut_Nm为限制最大扭矩20,符合需求
4)6s~6.8s,TqOut_Nm输出从20递增到100,递增时间0.8s((100-20)*0.01),符合需求
5)6.8s~10s,TqOut_Nm恢复为原始输入扭矩100,符合需求
小结
以上提及的算法是作者以往的实际电控项目实施中,以整车跛行扭矩限制及恢复需求为参考,该算法已经在代码生成以及实车测试中得到充分的验证。为了方便简要介绍,模型已经经过简化处理。
之前的篇幅专门对Simulink基本库模块搭建以及仿真做了讨论,本文通过Simulink转态机State Flow的方式来进行算法的建模。经过用同样的输入激励进行模型仿真,其结果也证明了该方法仿真结果与原来方法仿真结果的一致性,从而将原来的基本模块逻辑做了优化。在确保功能不变的前提下,提高算法的可读性,同时视觉上是不是也清爽了很多呢?






 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















