





地图构建是SALM的两大目标之一(SLAM被称为同时定位与建图)。在经典的SLAM模型中,我们所谓的地图就是所有路标点的集合。一旦确定了路边店的位置,我们就可以说是完成了建图。但是由于人们对建图的需求不同,需要建立的地图也各不相同。
对于人来说,我们可以看懂一张地图,但对于机器人应该给机器人一个易于理解和易于计算的数字文件。目前相关从业人士对于机器人导航地图所需信息已经研讨了很长时间,到现在为止也没有明确的论断。在此环境下,近年来出现了各种形式的机器人导航地图信息格式,有些不仅包括二维信息,而且还包括三维信息,甚至有些地图不仅包含有关移动的信息,还包含各物体的分割(segmentation)的信息。
一、地图分类
尺度地图中的距离和现实世界是相对应的,栅格地图、特征地图、点云地图都可以称为尺度地图,一般的定位都用到的是尺度地图,而且尺度地图是我们最常用到的地图

拓扑地图只表述其中两点的连通关系,并不关心路径,在一些大场景下,我们需要构建一个拓扑地图。
混合地图是在一张拓扑地图上,每一个点上添加一张尺度地图,在我们需要导航的时候,先对拓扑地图进行导航,再对其中的尺度地图进行导航。
二、覆盖栅格建图算法
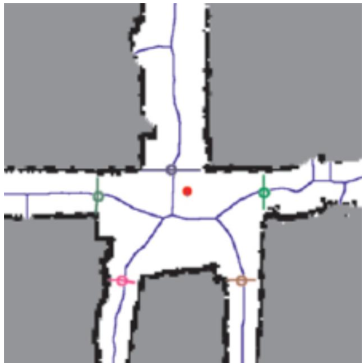
栅格地图简单来说就是把整个环境分成一个个小栅格,每个栅格有两种状态,一种是有障碍物,另一种是空闲,由于设置的栅格大小不同,所以可能导致建立出的栅格地图和实际的地图有稍许差异。但由于是非参数模型,随着地图的增大,对内存的需求会几句怎大,也正是由于非参数模型导致其可以天然区分可通行的区域,非常适合进行轨迹规划。
如果我们给定及亲热的位姿和传感器的观测数据:

估计出最可能的地图:


如果我们设占用为屏p(m)=1,空闲为p(m)=0,未知状态为p(m)=0.5。由于我们地图中每一个栅格都是独立存在的,因此数学表达式可以表示为:
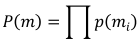
而对地图估计问题就可以表示为:

因此,如果我们需要估计整体的环境题图只需要对每一个独立栅格进行单独估计就可以得到。
如果Mi是一个二元随机变量,因此:
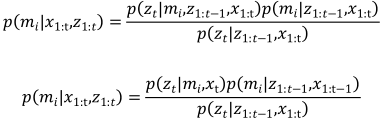
其中:

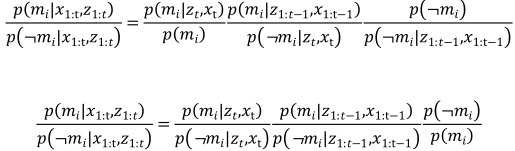
由于Mi是一个二元随机变量,得到:

同理,对于-Mi ,可得

两者相比:
对于二元随机变量:

对于p(x),定义对应的Log-Odd项:
则:
这样就可以变成:

其中:

表示激光雷达的逆观测模型
表示栅格Mi在t-1时刻的状态

表示栅格Mi的先验值,该值对所有栅格都相同





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















