





前端配准的任务就是将两个或以上坐标系中的点云数据转换到统一坐标系统中的数学计算过程。他的实质就是空间坐标变换。空间坐标的变换可以由三类参数确定:尺度、旋转和平移。
一、 ICP 匹配方法
ICP算法能够使不同的坐标下的点云数据合并到同一个坐标系统中,首先是找到一个可用的变换,配准操作实际是要找到从坐标系1到坐标系2的一个刚性变换。
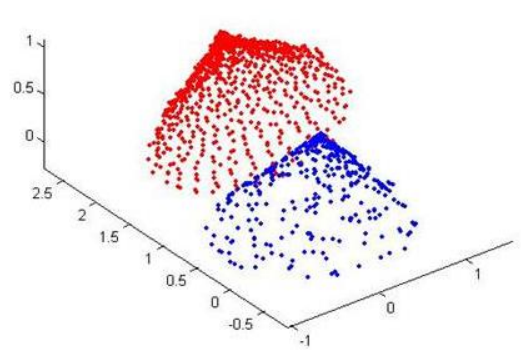
ICP是在点云中为了将的数据点进行匹配,我们给出两个点云集合,红色点云为Qi,蓝色点云为Pi
假如要将Qi和Pi进行匹配,那么,我们需要找到一个旋转矩阵R和平移矩阵T,使得两个点集的对齐匹配转换,是下列木变函数最小。
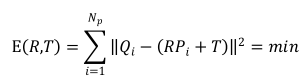
其中R和T就是找到的待配准点云数据与参考点云数据之间的旋转参数和平移参数,使得两点集数据之间满足某种度量准则下的最优匹配。换句话说匹配的根本是选取合适的R和T矩阵,使得他们之间所有的点的欧几里得距离之和小于给定的阈值,采用最小二乘的方法可以取得最终的R和T。并将蓝色点云通过拼接旋转到红色点云附近的位置上,达到匹配的目的。
ICP配准过程:
二、 PL-ICP 匹配方法
与普通的ICP相比,PL-ICP是连续的。由于激光雷达的扫描出的数据是离散的,我们不能保证两次在不同位置上扫描同一地点的扫描点全部落在同一个物理点上,这就是点对点的距离产生的误差,而PL-ICP中则使用点到线的距离作为误差。由于PL-ICP是点到线的误差,所以PL-ICP为二阶收敛,比PP-ICP一阶收敛的速度更快,精度也比PP-ICP更加精准。
在PL-ICP中通过点与线进行匹配,将当前帧的数据根据初始位置投影到参考帧的坐标下,对当前帧的点i,在参考帧中寻找到最近的两个点(P1,P2);再对误差进行计算,去除误差过大的点;最后的除最小化误差的函数。
现将第一次采集到的数据进行拟合,将离散的数据转变成连续的,再将洗一次需要匹配的点向连续的线上进行匹配,最后得到点到线的距离和整体的旋转角度。
三、基于优化的匹配方法 基于优化的匹配方法
如果把要优化的目标函数看成山谷的话,可以把要优化的参数看成滚下山的石头,参数随机化为一个随机数可以看做在山谷的某个位置以0速度开始往下滚。目标函数的梯度可以看做给石头施加的力。
在给定一个目标函数时,可以把激光的帧间匹配问题转换为求解目标函数的极值问题:

S(T)表示把激光数据用位姿T进行转换;
M(x) 表示得到坐标?的地图占用概率。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















