





一、概述
新能源整车电控策略开发目前比较主流的是采用基于模型的V字形开发流程:
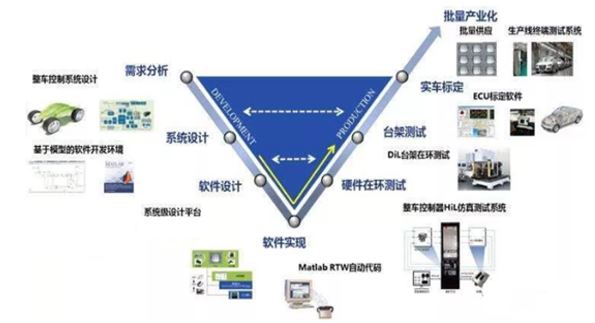
控制策略与仿真模型都是利用框图化的基本模块建立起来的,主要包括控制方案的设计、离线仿真、快速控制原型、产品自动代码生成及集成、硬件在环仿真测试和标定(台架及道路实车测试标定)。
二、整车功能定义
作为策略开发的设计目标,一般来说主要包括如下:
- 整车上下电管理
- 整车运行模式管理
- 整车档位管理
- 驾驶员扭矩需求
- 驾驶性扭矩滤波
- 整车扭矩限制
- 整车扭矩协调
- 整车扭矩分配(EV 4WD/HEV/PHEV)
- 换档策略(多档变速箱)
- 离合器控制 (HEV/PHEV)
- 爬行功能(EV/HEV/PHEV)
- 定速巡航
- 能量回收(滑行/制动)
- 高低压附件及HVAC管理
- 整车信息显示管理
- 整车充电管理(直流快充/交流慢充)
- 整车安全监控
- 故障诊断管理
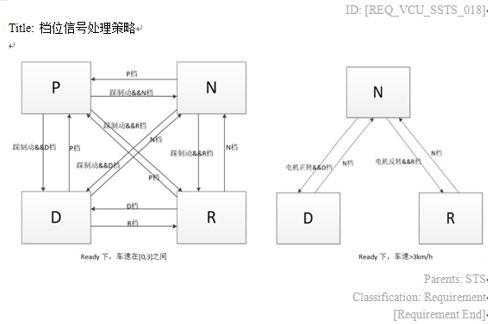
以整车档位管理为例, 其功能规范如下:
三、整车功能开发
目前,业内比较流行的整车功能是基于模型的自动代码生存开发方式,这种方式也是功能安全产品认证指定的开发模式。

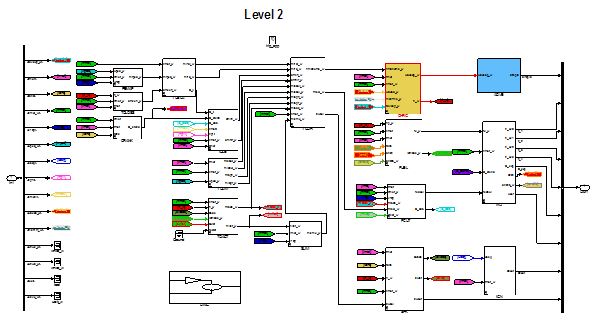
对于定义好的整车功能,通过专门的基于模型开发平台,逐个实现个整车功能策略逻辑,以某个项目的模型为例,整车控制模型如下:
四、策略功能测试
策略功能测试一般包括如下:
模型在环MIL测试 L2层及以下层模型库搭建完成后,需进行模型在环MIL测试,确认模型功能的完备性及修复逻辑BUG。
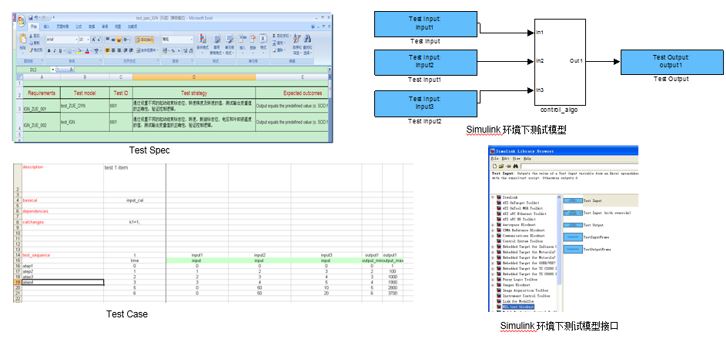
软件在环SIL测试 经过MIL测试及模型集成后,对模型对应生成的C代码,进行软件在环SIL测试,确认代码与模型逻辑的一致性。
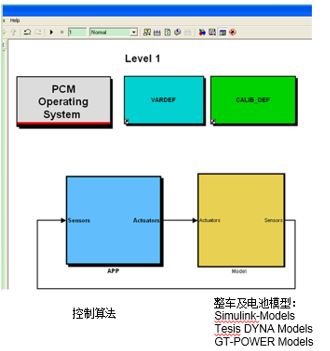
功能模块MIL测试通过后,按照Context model定义的软件框架结构进行L1层的软件集成及与INPUT/OUTPUT模块集成,形成结构完整的VCU/BMS控制算法模型 在生成代码前,为了验证集成模型的执行效果,进行SIL Test。
SIL Test在Simulink环境下实现软件在环仿真测试,整车及电池模型可以是基于Simulink仿真模型、Tesis 仿真模型、GT-POWER 仿真模型等。
小结
以上介绍了整车控制策略模型级别的开发和测试,对于整车控制系统级别的测试,会考虑软硬件集成,集成测试,硬件在环测试,整车功能标定,整车性能测试和标定等方面,这些都属于整车控制系统级别,并未在本文中提及。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















