




一、 概述
制动系统,作为整车基本功能,保障了整车制动安全。在传统汽车上,比较常见的是液压制动或气压制动,对于对于电动汽车,除了液压制动或气压制动外,以及电制动外(能量回收),通常还有比较常见的电动真空泵制动系统来实现辅助制动,下面我们就来简要的介绍常见的电动真空泵制动控制算法。
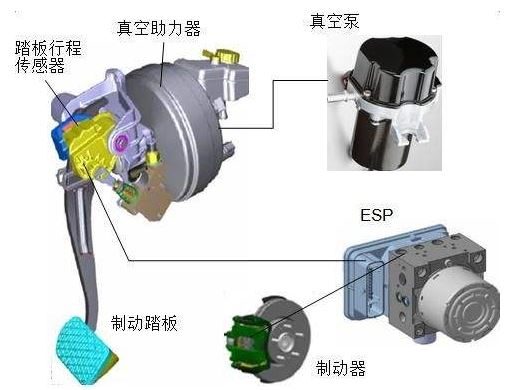
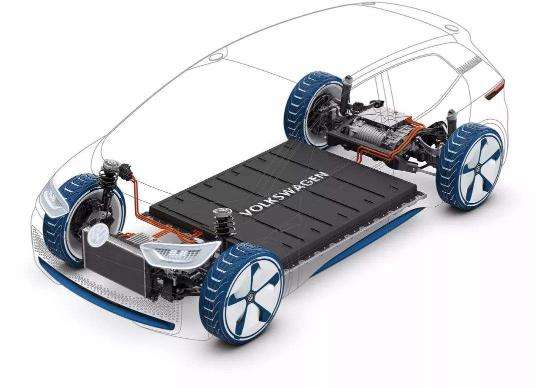
二、 真空泵制动系统组成及布置
电动真空泵(EVP)的主要作用是及时补充因驾驶人员采取制动措施消耗的系统真空度。
一般的电动真空泵在整车真空泵制动系统布置如图1所示:
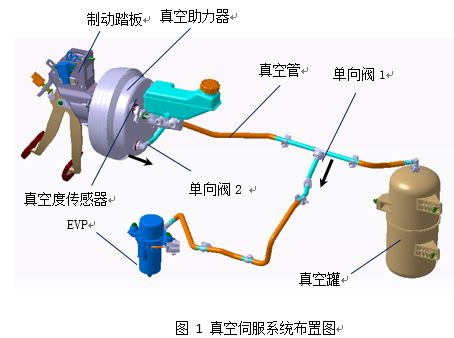
真空泵制动系统基本工作流程为:
驾驶员踩踏制动踏板过程中,真空助力器持续消耗系统真空度VACb。
当安装在真空助力器上的真空度传感器监测到系统真空度VACb达到设定最低值VACon时,真空泵开始工作补充系统真空;
当真空度传感器监测到系统真空度达到设定最高值VACoff时,真空泵停止工作。
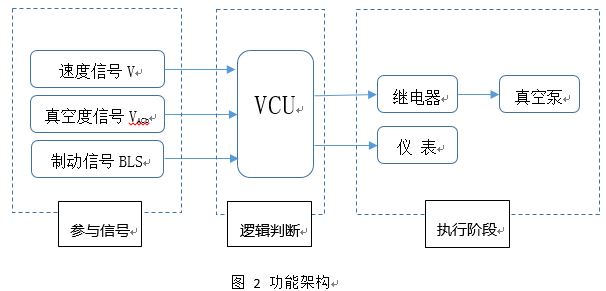
三、 真空泵制动系统功能架构
四、 真空泵制动系统功能逻辑
一般来说,电动真空泵控制算法分为正常控制模式、安全保护模式、故障诊报警模式。
1)正常控制模式
依据整车状态,系统低压上电后先进行自检,如果所有信号正常,控制算法按图3流程执行:
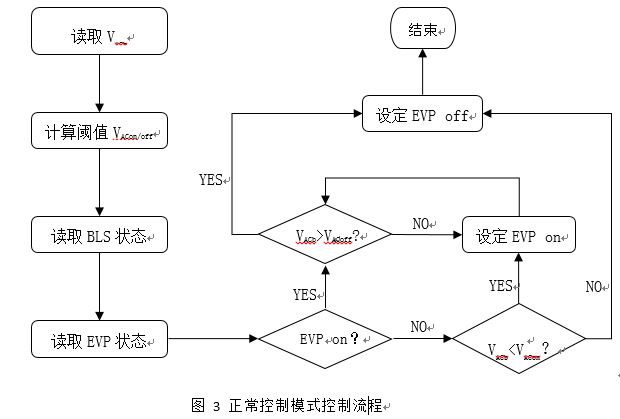
依据不同车速所需制动强度不同,一般真空泵启停采用动态阈值控制,如表1所示,此阈值设置可有效降低真空泵工作频次及时长,提升驾乘感受。

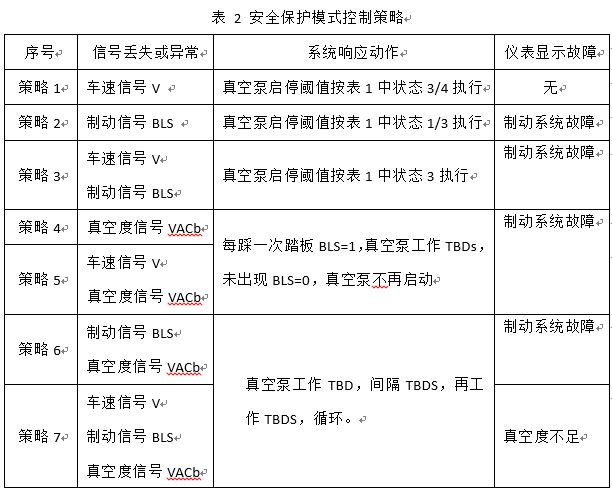
2)安全保护模式
在车辆初次上电或行驶过程中,如果出现部分信号丢失,可按如下的表2执行。
3)故障报警模式
以下对车辆上低压自检及部分传感器信号异常现象进行分类说明。
(1)低压自检
当车辆初次上低压时,系统需对各传感器进行自检工作,如车速信号V、制动信号BLS、真空度信号VACb均正常,自检通过。若上述信号异常,按表2进行相应报警警示;
(2)真空度信号VACb故障识别
如果真空度传感器输出电压大于TBDV或小于TBDV,并且持续时间大于等于TBDms,可判定真空度传感器故障;
(3)真空泵工作时长保护
真空泵开始工作后,何时停止不仅受关闭阈值VACoff影响,还与其连续工作时间有关,在真空泵工作过程中:
① 若BLS信号没有发生变化,则真空泵单次工作时长不得长于TBDs,未出现BLS=0,真空泵不再启动;
② 若BLS信号发生变化,则真空泵单次工作时长记录归零,重新记录时长直至达到TBDs或系统真空度达到关闭阀值VACoff;
小结
1)文中TBD代表各系统设定参数值为待确认的标定值,本文中没有具体体现,只是为了说明一般的控制算法实现方法。
2)以上算法主要参考于某具体的电动车电控开发项目,除了以上算法外,应该还有别的算法,所以以上算法仅供参考。





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















