





1. 前期回顾
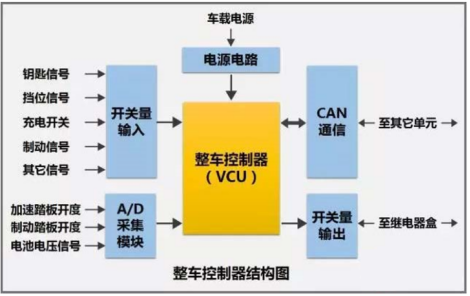
在电动汽车中,整车控制器VCU是核心控制部件,是电动汽车各个子系统的调控中心,协调管理整车的运行状态,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。此外,可通过行车充电和制动能量的回收等实现较高的能量效率。整车控制器结构图如下图所示:
在上一章节,我们简要讲述了整车控制器功能开发过程中能量回馈管理功能的一般需求及实现方法,整车控制器功能开发(六):能量回馈管理。本章节,将介绍整车控制器功能开发的蠕行功能管理。
车辆起步过程中面临的交通及道路环境复杂,较好地进行车辆蠕行扭矩控制,准确体现车辆起步等蠕行工况时的驾驶员行为意图,使电动汽车具备传统内燃机车辆的蠕行行驶习惯,确保车辆行驶稳定性及驾驶舒适性。
2. 功能描述
蠕行功能是指车辆处于 D 档或 R 档行车状态下,在未踩加速踏板和制动踏板时,车辆将以低速行驶,这样方便城市拥堵路况行车和跟车行驶。
蠕行进入条件:
当 VCU 同时检测到如下条件时,车辆就启动蠕行功能。
1)车辆处于 D 档或 R 档行车状态;
2)未踩油门踏板且检测到油门踏板开度<设定开度值(TBD);
3)D档车速≤设定车速值(TBD)/ R 档车速≤设定车速值(TBD);
4)制动信号无效且手刹无效 。
蠕行控制要求:
进入蠕行后,车辆将在保证驾驶性和舒适性的同时尽量满足在规定时间内使车速稳定在 蠕行设定车速。
退出蠕行条件:
1)整车处 P 档或者N 档 ;
2)检测到油门踏板开度≥设定开度值(TBD)或者整车出现需要下高压或禁止行车的故障满足以上两个条件时,整车退出蠕行,进入正常行车状态。
3. 功能接口
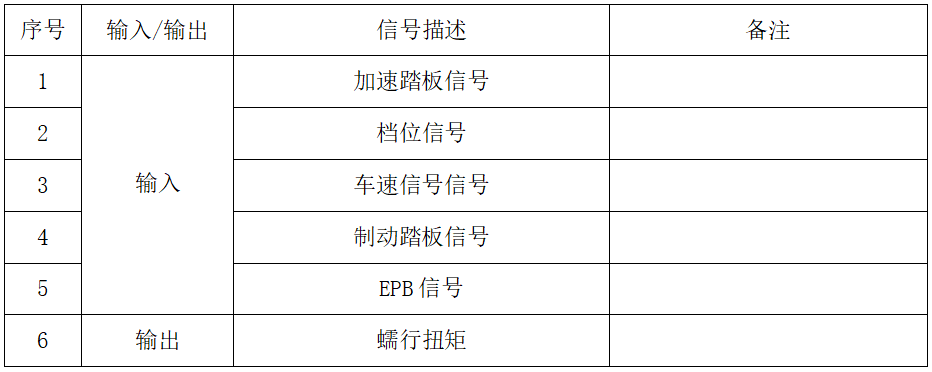
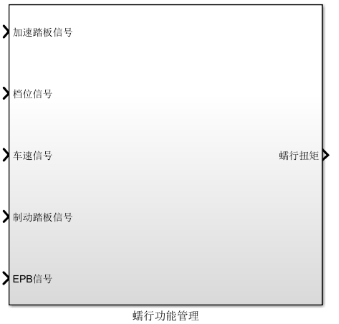
蠕行功能管理输入和输出接口,如下表所示。
4. 功能实现
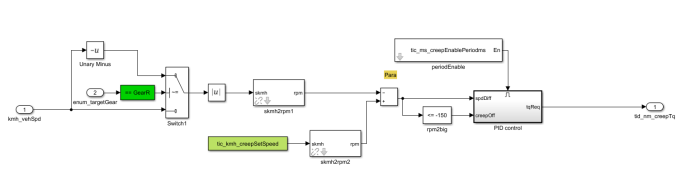
蠕行功能实现简化模型示意图如下所示:
蠕行功能管理模块的算法如下图所示:
5. 后期展望
本章节简要描述了整车控制器功能开发过程中蠕行功能管理的一般需求及实现方法,下一章节,将介绍整车控制器功能开发的驾驶模式控制功能。整车控制器功能开发(八):驾驶模式控制功能管理。




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















