




1. 前期回顾
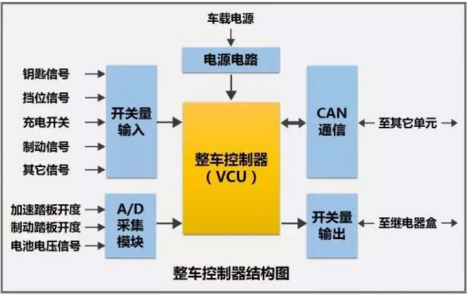
在电动汽车中,整车控制器VCU是核心控制部件,是电动汽车各个子系统的调控中心,协调管理整车的运行状态,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。此外,可通过行车充电和制动能量的回收等实现较高的能量效率。整车控制器结构图如下图所示:
上一章节,我们简要讲述了整车控制器功能开发过程中自适应巡航控制功能管理的一般需求及实现方法,本章节,我们简要介绍整车控制器功能开发的自动泊车控制功能。
随着汽车技术的快速发展,汽车的普及率越来越高,随之带来的问题是停车位需求量越来越大,停车位的空间越来越小,从而在现代都市中停车难的问题变得日益严重。在窄小的空间进行倒车入位操作,将汽车驶入狭小的空间已成为一项必备技能。很少有不费一番周折就停好车的情况,对很多驾驶不熟练的驾驶员造成了很大的困扰。由此引起的交通事故也在逐年增加,而且占交通事故中很大一部分,技术的发展为之提供了解决之道,这就是自动泊车功能。只需轻轻启动按钮、坐定、放松,其他一切即可自动完成。自动泊车系统不仅能推动社会现代化,更能提高交通安全指数。
2. 功能描述
当驾驶员驾驶车辆找到车位后,如果激活自动泊车功能,车辆能在APA、VCU、EPS、ESC协同工作下将车辆自动停进车位,而不需要人为控制车辆的方向、档位、油门、制动,使汽车自动正确的停靠位泊车,解决了用户泊车困难的问题,为用户停车带来了极大的方便。
当用户将车开到车位跟前时,将变速杆推入R 档,然后按下泊车辅助键之后,自动泊车功能激活,APA自动测量车子与障碍物和车位的距离等环境参数信息,开始泊车。
激活自动泊车APA 需与VCU 进行握手,握手成功后APA 向VCU 进行扭矩控制和档位控制,泊车完成APA 向VCU 发出泊车完成信号,随后发出退出泊车信号正常退出泊车,若中途出现故障,将进入泊车异常退出流程。
3. 功能接口
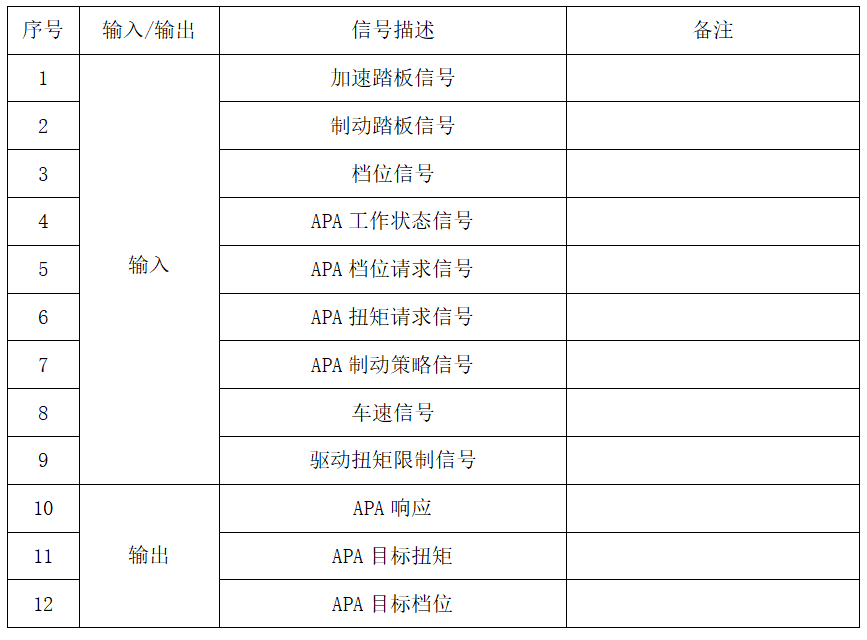
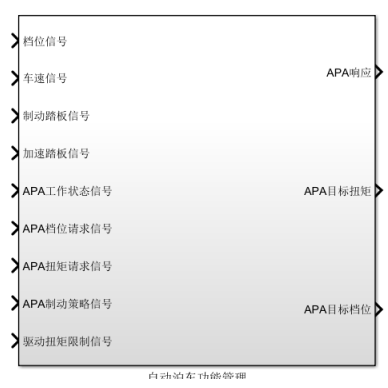
自动泊车控制功能模型输入和输出接口参数,如下表所示:
4. 功能实现
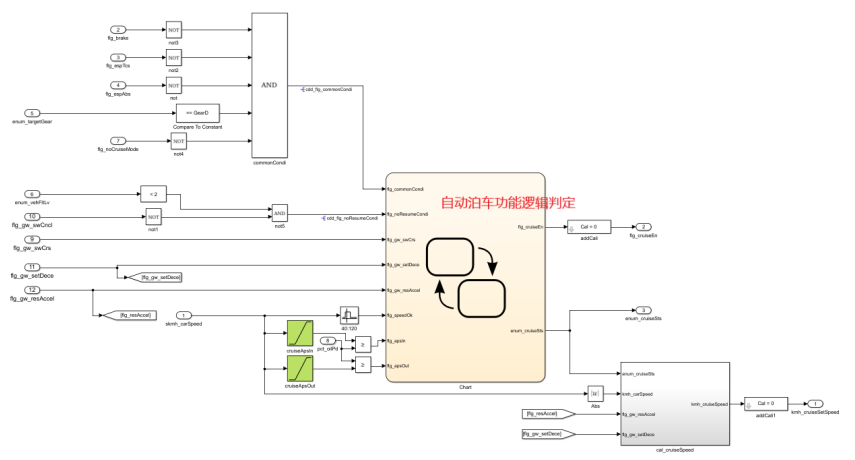
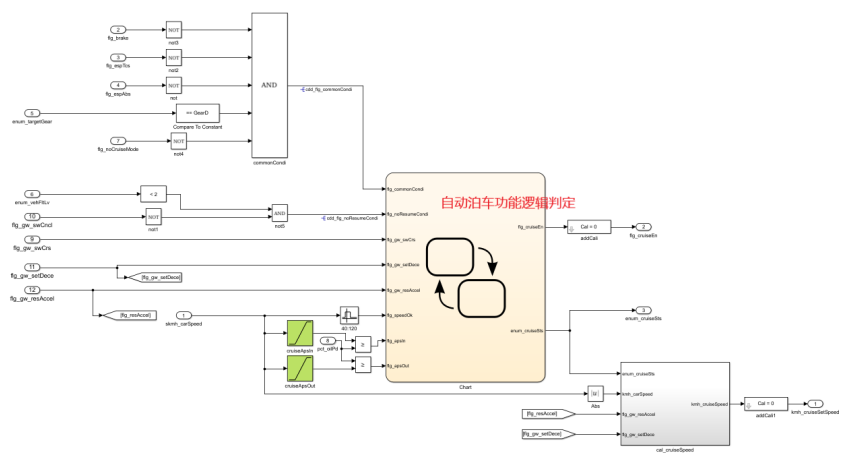
自动泊车控制功能管理模型简化示意图,如下图所示:
自动泊车控制功能管理模块部分算法如下图所示:
5. 后期展望
本章节简要描述了整车控制器功能开发过程中自动泊车控制功能管理的一般需求及实现方法,下一章节,将介绍整车控制器功能开发的跛行控制功能,敬请期待。




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















