





1. 前期回顾
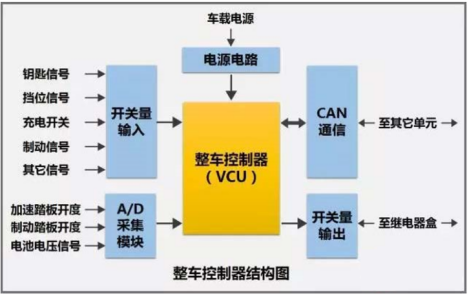
在电动汽车中,整车控制器VCU是核心控制部件,是电动汽车各个子系统的调控中心,协调管理整车的运行状态,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。此外,可通过行车充电和制动能量的回收等实现较高的能量效率。整车控制器结构图如下图所示:
上一章节,我们简要讲述了整车控制器功能开发过程中定速巡航控制功能管理的一般需求及实现方法,本章节,我们简要介绍整车控制器功能开发的自适应巡航控制功能。自适应巡航控制(ACC)是一个允许车辆巡航控制系统通过调整速度以适应交通状况的汽车功能。安装在车辆前方的雷达用于检测在本车前进道路上是否存在速度更慢的车辆。若存在速度更慢的车辆,ACC系统会降低车速并控制与前方车辆的间隙或时间间隙。若系统检测到前方车辆并不在本车行驶道路上时将加快本车速度使之回到之前所设定的速度。此操作实现了在无司机干预下的自主减速或加速。
自适应巡航控制系统的最大优点在于不仅能够保持驾驶人预先设定的车速,还能够在特定驾驶条件下随时根据需要降低车速,甚至自动制动。
2. 功能描述
自适应巡航控制可以使驾驶员以预先设定的跟车距离保持与前车的车距驾驶车辆,而不用踩加速踏板。当VCU判定满足自适应巡航条件后,VCU响应ACC的扭矩请求进入自适应巡航模式。VCU根据需求以及油门踏板开度对应的扭矩值,计算得出需求扭矩发送至MCU,MCU驱动电机工作。ACC 通过接受当前实时车距,实时调整扭矩请求,从而形成闭环控制模式,保证车辆以恒定跟车距离行驶。
3. 功能接口
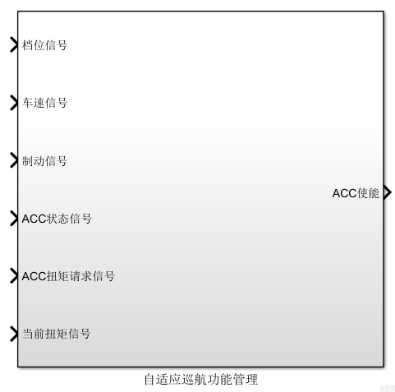
自适应巡航控制功能模型输入和输出接口参数,如下表所示:

4. 功能实现
自适应巡航控制功能管理模型简化示意图,如下图所示:
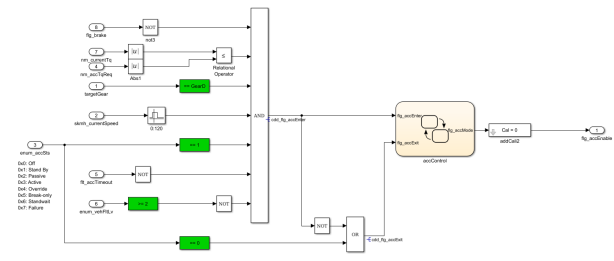
自适应巡航控制功能管理模块部分算法如下图所示:
5. 后期展望
本章节简要描述了整车控制器功能开发过程中自适应巡航控制功能管理的一般需求及实现方法,下一章节,将介绍整车控制器功能开发的自动泊车控制功能,敬请期待。




 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















