



一个完整的CAPL程序由四部分组成:头文件include files、全局变量声明、事件处理和自定义函数。
1. 头文件
如何提高代码的重用率,成为大型测试工程编程的关键。因此,CAPL提供了*.cin文件(callback interface file),用户可以通过该文件搭建自定义的测试框架。
例如,基本诊断服务定义在BaseServices.cin中,基本函数定义在CommonFunctions.cin中,测试用例函数定义在Testfunction.cin中,将相关测试用例定义在测试模块文件ECU_01.can中,那么在各个文件中的头文件结构如下:
在TestFunctions.cin中:
Includes
{
#include “CommonFunctions.cin”
#include “BaseServices.cin”
}
在ECU_01.can中:
Includes
{
#include “TestFunctions.cin”
}
这样,在ECU_01.can中可以调用三个*.cin文件中的所有函数。
2. 全局变量声明
变量的作用域和生命周期仅限于变量声明的函数体(即大括号范围)内。CAPL在每个程序的开始部分提供了variables区域给用户声明全局变量。
Variables
{
Int i=0
message 200 msg;
Timer mytimer;
在此部分声明的全局变量的生命周期从仿真开始持续到仿真结束,其作用域为整个CAPL文件。而在*.cin文件中声明的全局变量在包含他的*.can或*.cin中视为可见。
3. 事件处理
CANoe主要是用来对CAN通信网络进行建模、仿真、测试和开发的一种工具,因此对实时性和逻辑关系尤为关注。作为CANoe的辅助语言,CAPL采用了面向事件的机制来满足这样的需求。通俗来说就是:在什么条件下,在什么节点,发生了什么样的报文传递,得到了什么样的报文反馈。而面向事件的机制是通过event handler来实现的。
(1)事件起始关键字on*
On *
{
语句;
}
On后面加某种条件,一旦条件满足则执行下面函数体内的语句。函数体内的语句是实现接下来需要完成的操作。
(2)关键字this
在CAN报文事件或变量事件中,可以使用关键字this访问数据内容。例如:
on message 200
{
byte byte_0;
byte _0=this.byte(0);
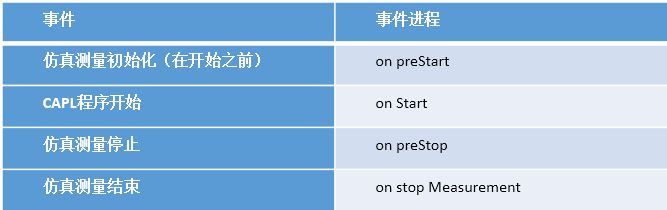
(3)系统事件
系统事件主要用于处理CANoe测量系统的控制功能,主要如下表所示。
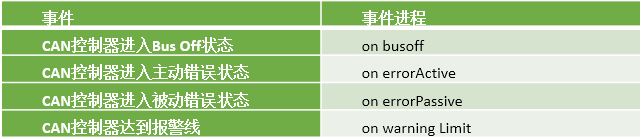
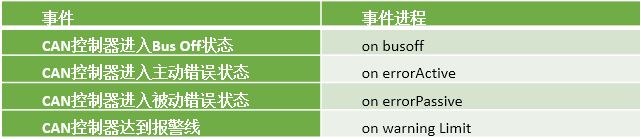
(4)CAN控制器事件
CAN控制器事件是对硬件接口设备中CAN控制器状态变化事件的响应,如下表所示
(5)CAN报文事件
CAN报文事件在CAN在CAN总线上有指定的或任意报文出现时被调用。关键字为on message XXX
(6)CAN信号事件
CAN信号事件是在CAN总线上出现指定的信号时被调用(需配合DBC)使用。关键字为:on signal xxx或on signal_update xxx,前者只在指定信号值发生变化时被调用,后者在每次接收到指定信号时均被调用。
(7)定时事件
定时器变量可以用来创建一个定时事件,SetTimer函数用来设定时间间隔。当定时器运行到达设定时间间隔时,将触发该事件,这时on timer函数中的程序块被执行。周期性触发需要在每次触发后使用SetTimer复位。若在定时器运行中需停止计时,可以用CancelTimer函数来取消计时。
(8)键盘事件
在测量过程中,由用户来触发某些事件来模拟实际测试环境的人工操作。键盘事件的关键字为on key xxx。
(9)错误帧事件
当总线上出现错误帧或过载帧时,错误帧处理机制被调用。
(10)环境变量事件
环境变量事件是对环境变量发生变化的响应,关键字为on enVar xxx。
(11)系统变量事件
系统变量事件是对系统变量发生变化的响应,关键字为on sysVar xxx。
(12)诊断事件
在诊断请求或诊断响应发生时产生。关键字为 on diagrequest<newRequest>。
本部分内容主要向您介绍了CAPL程序组成的头文件include files、全局变量声明和事件处理部分,这些内容你掌握了吗?





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















