





智能汽车为什么需要新的电子电器架构?
面对汽车智能化程度的不断提高,传统的分布式架构已不能满足汽车快速增长的功能与软件的需求。建立更加灵活、开放、面向手机形式的架构逐渐成为业界关注的焦点。
目前汽车有多达几十甚至上百个电子控制单元并连接到多个总线上,据Strategy Analytic预测,各级别汽车控制器的数量呈增加趋势,平均来说,目前一般的汽车大约采用25个ECU,但一些高端车型已经采用超过100个ECU。将来若依然采用这种分布式E/E架构,会让汽车面临规模更大且复杂度更高的车载网络和布线,布线难度的增长同时面临着成本的增加和整车轻量化的矛盾。
电子电器架构简述与新一代电子电器架构的由来
“电气”即与,电相关的意思,可以作为定语形容所有与电相关的事物,例如电气系统、电气零件、电气功能等。“电子电气”其实可以用电气来代替,因为电子也是与电相关的所以电气也包含电子。但目前在汽车行业内,电子电气架构(E/E架构)已经成为约定成俗的叫法,因此称为“电子电器架构”而不是“电气架构”。
电子电气架构属于车辆电子电气系统的顶层设计,目前是在功能需求、法规和设计指标等特定约束条件下,综合对功能、性能、成本和装配等方面的具体分析,得到最优的电子电气系统技术方案。伴随着平台化、模块开发理念在车辆开发中的应用,电子电器系统普遍基于平台化要求进行规划,即构建利于复用、裁剪、扩展的电子电器架构,用于支撑目标市场的不同车型。
随着汽车配置复杂度的增加,电子电器系统越来越复杂。同时电子电器的成本压力也越来越大。鉴于以上原因,Tire1博世、德尔福提出了EEA(Electronic & Electrical Architecture)概念,取代了传统意义上的原理线束设计。
电子电器架构现状与未来发展趋势
1、 传统的分布式电子电气架构
传统的分布式电子电气架构,当一个新功能被添加到汽车上时,方法只是简单地添加一个ECU,多一点电线和线束布线,然后嵌入硬件和软件。最后找到放置它的最佳位置。自从汽车问世以来,我们一直在不断地增加,让传统的分布式电子电器架构的复杂度越来越高。
CAN总线的出现改善了电子电气架构的效率与互操作性。另外,CAN总线还显著降低了系统的复杂度,而复杂度降低又意味着可以减少布线数量。在这种情况下,不仅可协助车辆实现最高减重45kg公斤,还能节约珍贵的安装空间。
但即使这样,如今的高档车使用100多种不同的ECU,线束长度从1.5英里增加到2.5英里。在这种架构下,大量ECU单元会相互协同工作,共同为驾驶员能提供各种功能。但这种架构已经快要“到达极限”了,就不可避免的会带来一系列问题。目前大部分车企E/E构架设计面临四大挑战:功能安全、实时性、带宽瓶颈、算力黑洞。智能汽车E/E构架正从分布式走向集中式;其终极形态将是超级中央计算机。
图1:主流汽车的分布式电子电器架
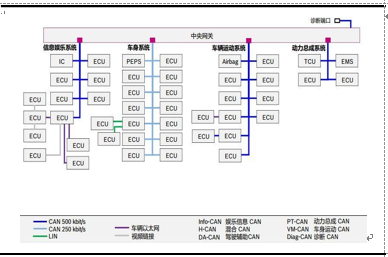
Source:《特斯拉研究报告-用软件定义汽车》
2、集中式电子电器架构
当前的汽车里,基本上每个功能都对应一个独立的ECU,其结构会很复杂。逐渐地,将一些功能合到一个ECU里去运行,即下图中描述的功能集成,减少控制器节点,降低复杂度和成本。慢慢地,控制器要往“域”方向发展,目前车辆上主要有动力域、车身域、自动驾驶域、底盘域、信息娱乐域,这些域控制器可以去完成各自域内协调的工作,可以实现中央化软件集成平台,便于软件管理和车辆变形(比如说,当车辆动力系统拓扑发生变化,域内节点增加或减少,可通过更新域控制器软件就可以实现变形)。再往后,就会朝向跨域和车辆与云端进行交互,以满足不同的应用场景。
图2:电子电器架构的发展趋势
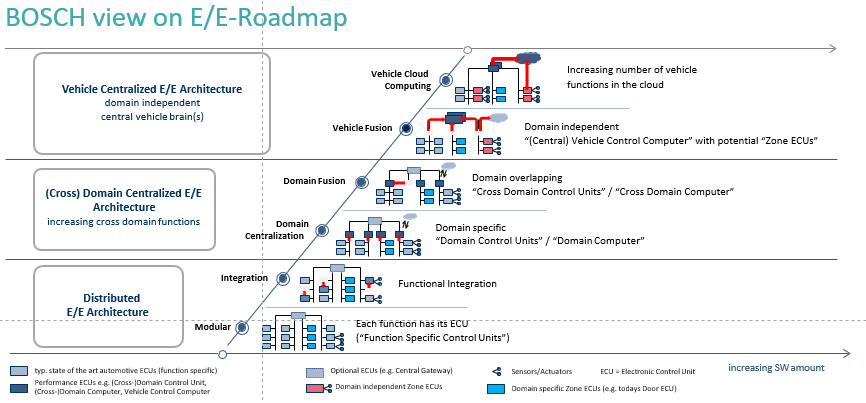
Source:《博世-汽车电子电器架构发展趋势展望》
面对与日俱增的系统复杂度,电子电气架构必须调整以适应这些需求。未来架构须能提供新的解决方案,同时又要解决看似矛盾的需求,如降低成本,缩短开发时间,提高弹性和可扩充性。架构的设计概念可以从不同角度出发,例如以功能为导向的方式,不同功能有各自的控制器、传感器和执行器。或是以集中控制的方式,多个功能由一个控制器来实现,这样好处是降低了ECU数量。
3、未来汽车电子电器架构的几个发展方向:
• 域的概念和中央服务器架构使原来分散的算力集中化,在降低架构复杂度的同时提高了系统算力。
高性能的运算单元带来了高集成性,目前将多个ECU合并成一个ECU这种功能集成化方式为很多企业所采用。未来基于MPU等更高算力的车载计算平台,利用多核技术,达到平行处理多个相依性低的软件模块,减少硬件数量将成为趋势。将同时基于域的电子电器架构能够大大降低整车的线束长度(传统汽车线束长度超过3000米),和线束布线的难度,提高了自动化装配效率,降低成本。
• 软硬件解耦,让汽车软件实现即插即用,具备可持续的迭代升级能力。
传统的分布式架构中大量分离的嵌入式OS和应用程序Firmware,由不同Tier1提供,语言和编程风格迥异,导致没法统一维护和OTA升级,面向服务的架构(SOA)的应用,使汽车软件开始朝向低耦合且松散的方向发展,可以真正地实现硬件标准化和软件开发重复利用,既实现供应商可代替,也可以大大缩短软件迭代周期,同时为日后第三方软件开发扫清了障碍。车辆将成为移动的智能终端,同时大量计算工作可以集中至车载中央处理器甚至云端,减少了内部冗余同时车联网协同成为可能。
• 车载以太网应用,解决了汽车处理海量数据的实时性要求。
随着汽车智能化网联化的发展,车辆待传数据体量显著增大,对数据传输实时性的要求也在提升。车载以太网络作为集中式网络架构的主干网络可以有效降低汽车电子电气架构复杂度,减轻线束重量,提升通信能力,大幅降低连接成本。
最后我们再来一点总结
如前所述,当前的汽车里,基本上每个功能都对应一个独立的ECU,其结构会很复杂。逐渐地,将一些功能合到一个ECU里去运行,即功能集成,减少控制器节点,降低复杂度和成本。慢慢地,控制器要往“域”方向发展,目前车辆上主要有动力域、车身域、自动驾驶域、底盘域、信息娱乐域,这些域控制器可以去完成各自域内协调的工作,可以实现中央化软件集成平台,便于软件管理和车辆变形(比如说,当车辆动力系统拓扑发生变化,域内节点增加或减少,可通过更新域控制器软件就可以实现变形)。再往后,就会朝向跨域和车辆与云端进行交互,以满足不同的应用场景。







 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















