




具有纵向自动驾驶控制功能的车辆来讲,路况环境复杂多变,其中不同曲率的弯道上的控制是检验自动驾驶控制性能的重要环节。车辆在弯道控制当中的安全性、平顺性以及过弯效率恰恰反映了车辆的综合运动控制的性能。
在自动驾驶控制中,弯道曲率是很重要的一种参数。如今,不少具有纵向自动驾驶功能的车辆均靠毫米波雷达来探测障碍物和路况信息。而如果没有配备图像采集功能的传感器和识别车道线形状的传感器,弯道曲率需要通过其余信息来获取。本文提供了一种通过车辆行驶速度、横摆角速度和方向盘转角估算弯道曲率并进行弯道控制的方案。
该系统动态输入包括:车辆行驶速度、车辆横摆角速度、车辆方向盘转角信息;该系统的输出包括:弯道最高车速限值、弯道最大的车辆纵向加速度限值等;其控制系统包括:自动驾驶控制器、轮速传感器、惯性测量单元(IMU)、方向盘转角传感器等等。
可根据轮速传感器提供的信息可算得车辆行驶速度,方向盘转角传感器可提供车辆方向盘转角信息,惯性测量单元可提供车辆横摆角速度,自动驾驶控制控制器根据以上信息估算动态的道路曲率、弯道控制车速限值和弯道控制车辆加速度等。通过以上两种信息,可以控制所需的驱动扭矩和制动扭矩等。
方案步骤如下:
步骤1:通过方向盘转角可计算车轮转角,再通过车轮转角计算当前车辆运行轨迹的道路半径,如此一来就可以计算出当前的动态轨迹曲率值。
步骤2:通过横摆角速度计算得动态轨迹曲率。
步骤3:融合处理通过不同方法算出的道路曲率值Ccurve。在车速较低(Vcurr<1m/s)情况①下采用步骤1算得的曲率,在车速较高(1m/s <= Vcurr <= 30m/s)的情况②下用步骤2算得的曲率,在车速高于在区间(40m/s <= Vcurr)的情况④下建议加入权重比,在②的基础上乘权重比例参数并结合①时的前馈值计算曲率,该前馈对①的计算结果乘以常数k(k由车辆具体情况而标定所得),车速在②和④之间的情况③下通过线性内插法将②和④平稳过渡。
步骤4: 对道路曲率进行滤波处理,此处使用低通滤波。
步骤5:通过车速和最大需求横向加速的关系曲线(图1),可以求得动态的最大横向加速度值。该曲线可以通过查表得方式实现。
步骤6:利用横向加速度限值aymax和道路曲率Ccurve,计算弯道速度限值Vmax:
步骤7:根据Vmax、当前车辆行驶速度Vcurr和达到期望车速的预瞄时间T,计算出期望的纵向加速度ax。其中,预瞄时间T与当前车速Vcurr相关,在当前车速较小(Vcurr<10m/s)时,T的值也取较小的值Tmin(建议值3),在当前车速Vcurr较大(Vcurr>45m/s)时,T的值取较大值Tmax(建议值10),在当前车速在前两个阈值之间时,T值通过线性内插法得到:
步骤8:将计算出来的纵向加速度期望值ax提供至下一层的控制模块,并结合当前的纵向加速度,进行PID控制。与此同时,可以用Vmax进行约束,进行对车辆的纵向控制。
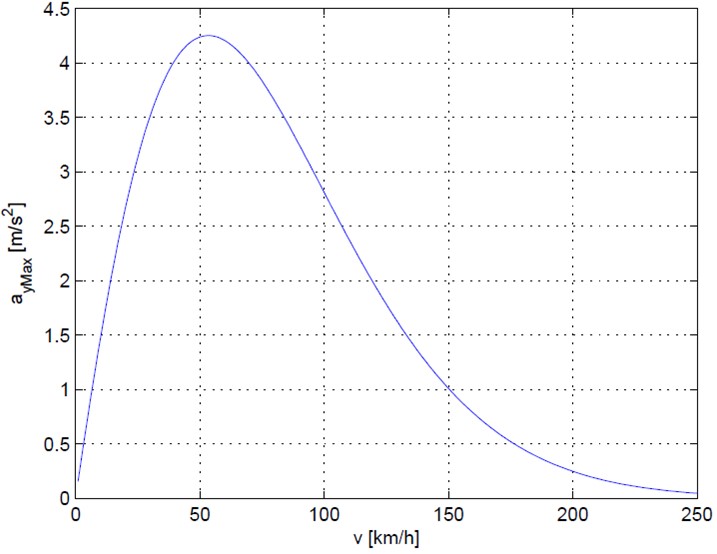
上图为车速和最大需求横向加速的关系曲线,参考了K. H. Schimmelpfennig的研究内容。
以上内容供读者参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















