



前文介绍了LKA系统结构介绍和车道保持子系统内部接口介绍等内容。本文将继续介绍LKA子系统。
LKA系统的基本功能框架如下图所示,关键功能包括:车道线/车道边界探测、驾驶员操作检测、发送控制扭矩和系统状态提示。
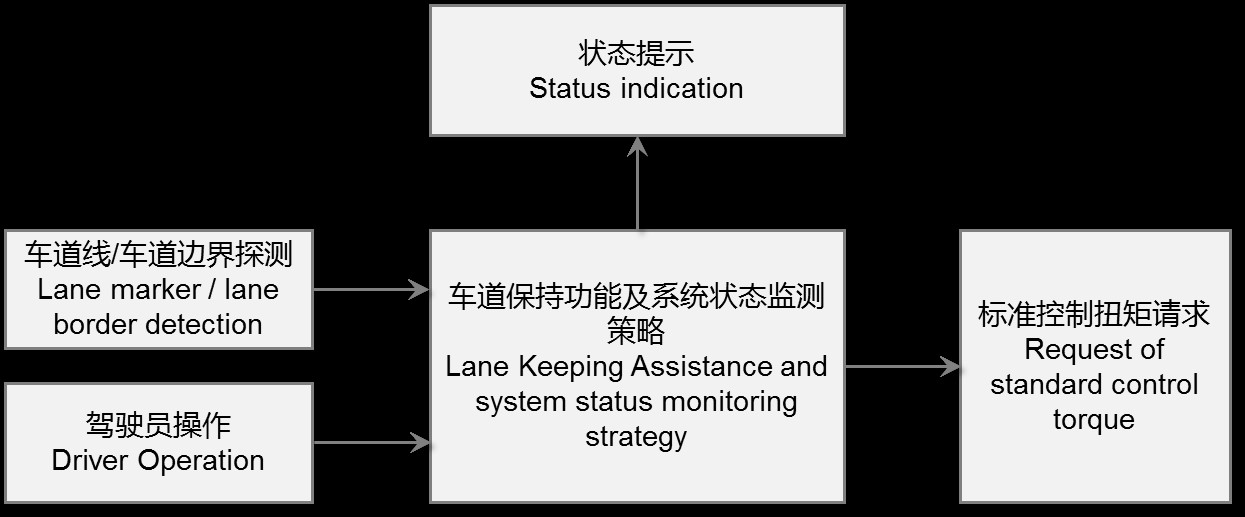
LKA系统基本功能示意图
LKA控制策略逻辑状态切换方式如下图所示:
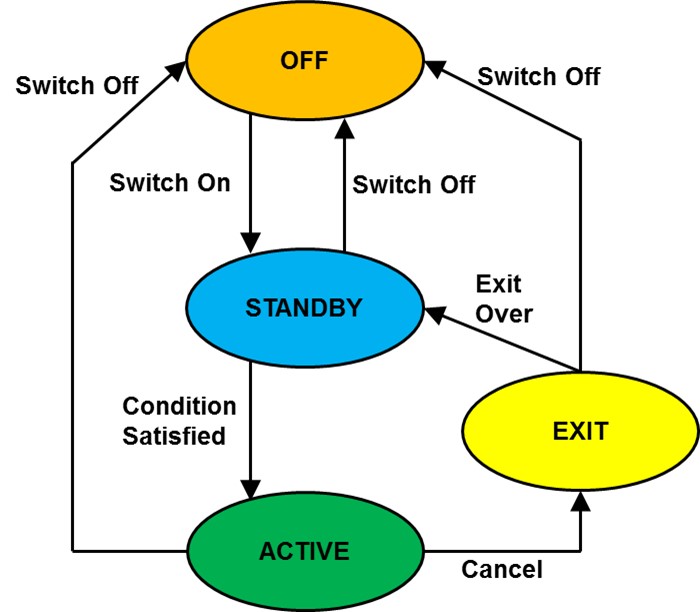
LKA控制策略逻辑状态图
LKA系统信号接口示意图如下所示:
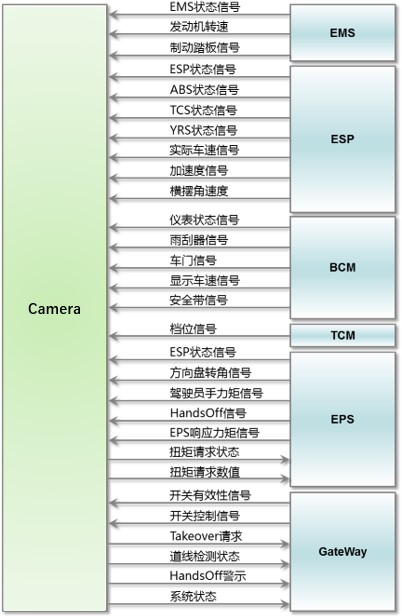
LKA信号接口描述图
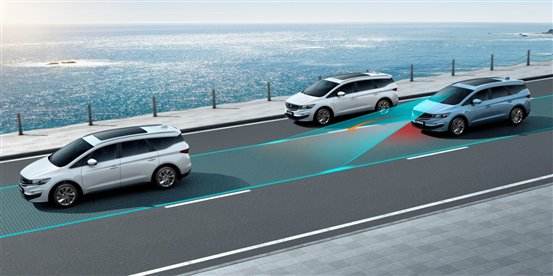
本文将以模型预测控制算法为例介绍LKA控制算法。LKA控制模型实现的功能是当驾驶员在环,车辆偏离车道线时,模型预测控制器产生一个主动纠正转角,与驾驶员的输入量叠加,通过联合控制使车辆沿安全轨迹线行驶。在联合控制过程中,以驾驶员为主体,模型预测控制以驾驶员在环的“人-车-路”闭环系统为控制对象。
为了实现上述功能,首先建立如下图所示的单点预瞄驾驶员模型与车路跟随系统共同构成“人-车-路”闭环控制系统的模型。
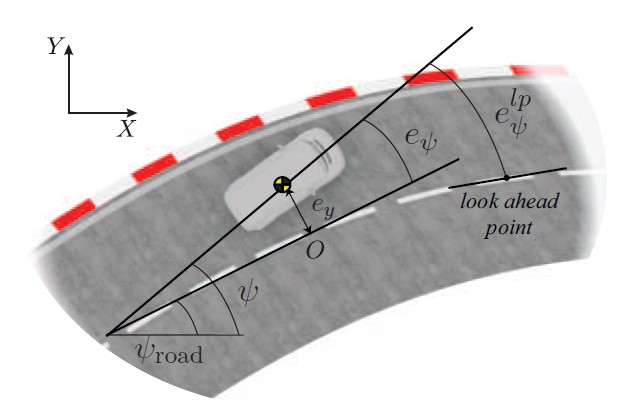
驾驶员单点预瞄模型
所使用的驾驶员模型如下式所示。假设技术成熟的驾驶员驾驶员一般基于当前时刻偏离道路中心线的距离误差、相对横摆角及预瞄点处车道线方向的变化角度来作出转向控制。

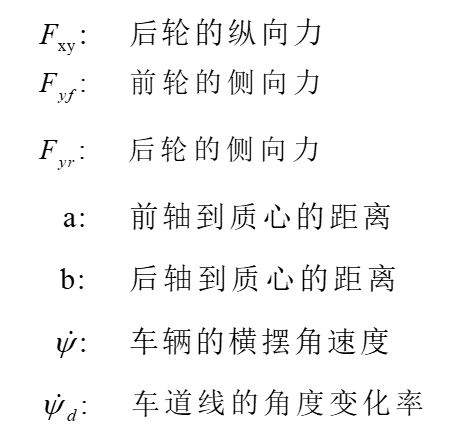
其中,各个字母代表的参数含义如下:

控制算法的设计以单车模型为基础。根据单车模型,车辆的运动可以用下面的公式来表达:
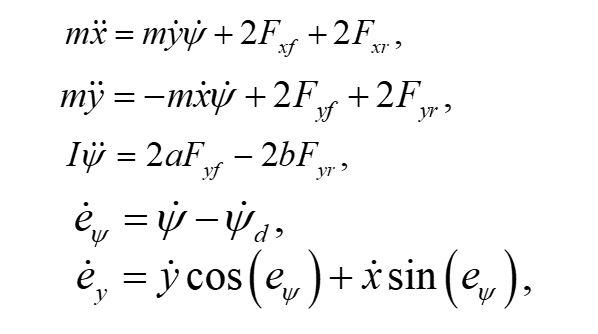
其中,各个字母所代表的参数含义如下:
车辆的前轮转角由驾驶员输入的转角和控制器输入的前轮纠正转角两部分组成。控制算法的输出是前轮纠正转角,通过控制器的主动纠正,实现车辆始终沿车道线行驶。
本文主要介绍了LKA系统基本功能框架、LKA控制策略、LKA信号接口、LKA控制算法主要内容等,以供参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















