



智能辅助驾驶子系统是用于实现安全预警、主动安全和辅助自动驾驶功能的系统。根据功能可该子系统划分为:安全预警模块、主动安全模块和驾驶控制硬件部分。
常见安全预警模块功能如:
LDW:车道偏离预警功能(侧向安全预警功能);
BSD:盲区检测功能(侧向安全预警功能);
FCW:车辆前装预警功能(纵向安全预警功能);
PCW:行人碰撞预警功能(纵向安全预警功能);
等等……
常见的主动安全模块如:
LKA:车道保持系统(侧向主动安全功能);
AEB:自动紧急制动系统(纵向主动安全功能);
ACC:自适应巡航系统(纵向主动安全功能);
SAS:自动限速系统(纵向主动安全功能);
等等……
常见的智能辅助驾驶子系统可分为传感器、控制器、人机交互、执行器四个层面,如下图所示:
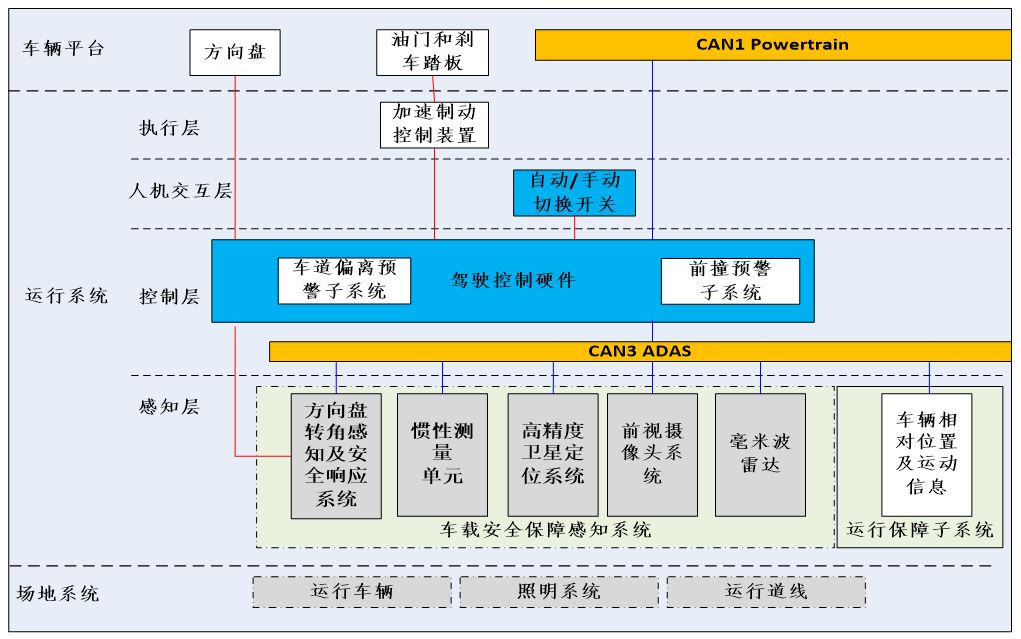
辅助驾驶系统结构简图
车道保持系统LKA(Lane Keep Assist)通过前视摄像头系统实现。该系统由摄像头、图像处理模块、MCU控制模块、网络适配模块和图像输出模块(可选配)几个部分组成,如下图所示:
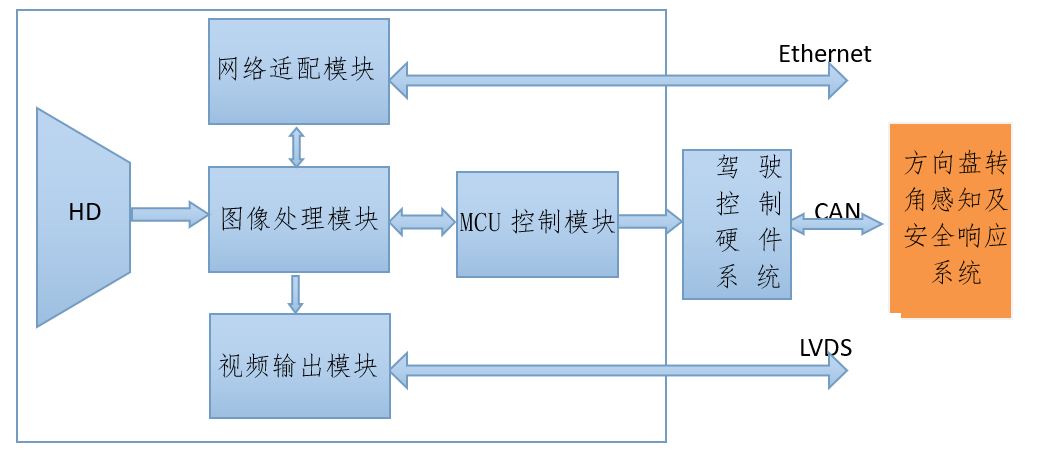
车道保持系统简图
LKA功能在车道偏离预警系统LDW的基础上通过车载安全保障感知系统提供的方向盘转角感知及安全响应系统自动调节方向盘角度,当驾驶员无意识情况下(没有提供偏出方向的转向灯等证明驾驶员转向意图的信息)偏出当前行驶车道时帮助驾驶员将车辆保持在当前行驶车道中。
前视摄像头系统通常安装于车辆前挡风玻璃内侧,通过并行数据线将视频数据回传至图像处理模块。以Mobileye EyeQ3为核心的视觉系统为例,其功能包括摄像头的复位供电、控制摄像头运行参数、视频采集、图像处理、道路目标信息输出、摄像头的标定与调试、图像输出等功能。
高清摄像头模块通过网络适配模块与图像处理模块通讯,并通过以太网访问图像处理模块的实时信息,从而对系统进行标定、刷新和监控。图像输出模块可将摄像头输出的并行视频数据转为串行LVDS信号输出,可通过LVDS板卡获取原始高清视频进行系统调试。高清摄像头模块输出信息输入到驾驶控制硬件系统中进行处理。驾驶控制硬件系统对整个车道保持系统进行供电复位控制、板内温度电压监控及故障诊断、关键数据的存储、接受车辆运行参数并转发给图像处理模块、接受和过滤道路目标信息并通过CAN总线发送给车辆驾驶控制子系统。

车道保持子系统内部接口简图
常见车道保持子系统电气接口:
12V供电信号;
GND;
点火信号IGN;
CAN信号,波特率通常为500Kbps;
以太网信号;
LVDS输出信号
车道偏离预警子系统信号接口:
输入信号:车速/横摆角速度/左右转向灯/方向盘转角/雨刮等;
输出信号:车道线偏出信息/前车距离信息/在径前车距离信息/碰撞预警信息等。
本文介绍了智能辅助驾驶系统的常见子功能、辅助驾驶系统结构介绍、车道保持系统结构介绍和车道保持子系统内部接口介绍等内容,以供参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















