




前文介绍了FCW和PCW系统功能描述、基本算法框架及算法逻辑状态等内容,本文将对FCW和PCW控制策略转换条件及信号接口等内容。

FCW(PCW)逻辑状态图
OFF State:
OFF状态是当功能主开关处于关闭状态时所属的状态,也是车辆上电的默认状态。
OFF State进入条件:1、上电初始化;2、从STANDBY状态进入-->用户关闭主开关;3、从ACTIVE状态进入-->用户关闭主开关;4、从FAILURE状态进入-->用户关闭主开关。
OFF State执行动作:系统故障检测。
STANDBY State:
STANDBY状态时当用户打开主开关之后,系统检查当前工作条件是否满足的状态。
STANDBY状态进入条件:1、从OFF进入-->用户打开主开关;2、从ACTIVE状态进入-->FCW(PCW)工作条件不满足;3、从FAILURE状态进入-->FAILURE条件解除。
STANDBY State执行动作:1、系统故障检测;2、检查FCW(PCW)的工作条件是否满足;3、在FCW(PCW)工作条件不满足时抑制状态跳转进入ACTIVE。
ACTIVE State:
ACTIVE状态时FCW(PCW)执行车辆靠近行为监控和报警的工作状态,该状态包含4种子状态:No Warning,Warning,Suppress Warning和Stop Warning。
ACTIVE状态进入条件:从STANDBY进入-->FCW(PCW)的工作条件全部满足。
ACTIVE State执行动作:1、系统故障检测;2、车辆/行人识别与跟踪;3、CIPV/CIPP筛选(Closet In Path Vehicle 最近在径前车/Closet In Path Pedestrian 最近在径行人);4、车辆行驶路径预测;5、计算本车与CIPV/CIPP之间的碰撞风险;6、检测报警抑制条件;7、检测报警中止条件;8、在报警条件满足时发出报警;9、在抑制条件满足时抑制报警;10、在抑制条件满足时抑制尚未发出的报警;11、在中止条件满足时中止报警;12、在中止条件满足时中止已经发出的报警。
ACTIVE Sub-state:No Warning:
No Warning子状态是ACTIVE状态的默认状态,此时算法可以识别检测范围内与本车同向行驶的车辆、障碍物和可检测的行人,并且准备好发出报警。
No Warning进入条件:1、从Warning进入-->报警结束;2、从Suppress Warning进入-->当前工作条件不再满足抑制条件&超过相应抑制条件所需的冷却时间;3、从Stop Warning进入-->当前工作条件不再满足中止条件&超过相应中止条件所需的冷却时间。
No Warning执行动作:1、识别检测范围内与本车同向行驶的车辆、障碍物及可检测的行人;2、筛选CIPV/CIPP;3、预测本车行驶路径;4、计算本车与CIPV/CIPP之间的碰撞风险;5、检测报警抑制条件。
ACTIVE Sub-state:Warning:
Warning子状态是ACTIVE状态的报警状态,此时车辆状态满足FCW/PCW报警条件,系统发出预警。
Warning进入条件:从No Warning进入-->FCW/PCW报警条件满足&无报警抑制&无报警中止。
Warning执行动作:1、识别检测范围内与本车同向行驶的车辆、障碍物以及可检测的行人;2、筛选CIPV/CIPP;3、预测本车行驶路径;4、计算本车与CIPV/CIPP之间的碰撞风险;5、发出报警;6、检测报警中止条件。
ACTIVE Sub-state:Suppress Warning:
Suppress Warning子状态是ACTIVE状态的阻止报警发出的状态,此时车辆状态满足抑制报警条件,系统不能发出报警。
Suppress Warning进入条件:从No Warning进入-->报警抑制条件满足。
Suppress Warning执行动作:识别检测范围内与本车同向行驶的车辆、障碍物以及可检测的行人;2、筛选CIPV/CIPP;3、预测本车行驶路径;4、计算本车与CIPV/CIPP之间的碰撞风险;5、检测报警抑制条件;6、在抑制条件满足时抑制尚未发出的报警。
ACTIVE Sub-state:Stop Warning:
Stop Warning子状态是ACTIVE状态的中断已经发出的报警状态,此时车辆状态满足中止报警条件,系统不能发出报警。
Stop Warning进入条件:报警中止条件满足。
Stop Warning执行动作:1、系统故障检测;2、车辆、障碍物、行人识别与跟踪;3、筛选CIPV/CIPP;4、车辆行驶路径预测;5、计算本车与CIPV/CIPP之间的碰撞风险;6、检测报警中止条件、7、在中止条件满足时中止已经发出的报警。
FAILURE State:
FAILURE状态是FCW/PCW的故障处理状态,当检测到系统故障时进入该状态进行故障处理。
FAILURE状态进入条件:1、从OFF进入-->FCW/PCW系统检测到内部故障;2、从STANDBY进入-->FCW/PCW系统检测到内部故障;3、从ACTIVE进入-->FCW/PCW系统检测到内部故障。
FAILURE执行动作:1、系统故障检测;2、系统故障处理。
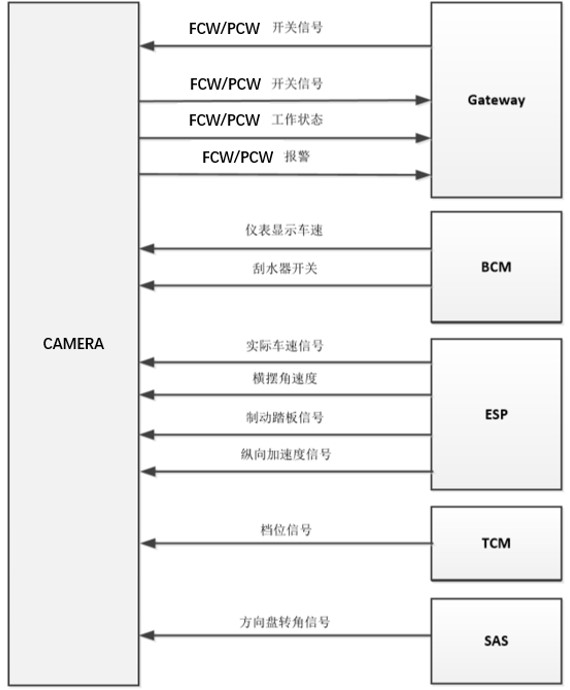
FCW /PCW系统信号接口描述图
智能辅助驾驶系统之FCW和PCW(1)、(2)两篇短文简单介绍了FCW和PCW两个系统的功能介绍、算法介绍、控制状态介绍及系统信号接口描述等内容,供读者参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















