




自适应巡航控制ACC功能根据车辆行驶方向的交通情况在纵向上自动控制车辆的加速与减速,减轻驾驶员的驾驶负担。当前方无车辆(障碍物)或前方车辆(障碍物)距离较远时ACC可以按照驾驶员设定的巡航速度行驶;当前方车辆距离较近时ACC可以根据驾驶员设定的跟车时距自动保持与前方车辆间的相对距离。驾驶员操作ACC系统的按键介绍如下图所示:

ACC系统操作按键示意图

ACC系统跟车距离调整按键示意图
本文将以视觉系统为主要传感器的ACC系统为例介绍自适应巡航系统。ACC通过前视摄像头感知车辆前方的交通情况,包括:识别前方同向行驶的车辆,筛选最近在径前车(CIPV)并计算出与CIPV之间的相对距离、相对速度等信息。如果CIPV存在且其形势状态对本车控制影响较大时,ACC可以调节本车速度使之与目标车辆车速一致,并且与CIPV保持设定的安全距离;当前方无CIPV时,ACC加速至驾驶员设定的车速,保持匀速巡航。ACC可以预测车辆的行驶路径,其预测基础有二:首先是前向摄像头识别到的车道线信息,其次为横摆角速度和方向盘转角等信息。基于以上信息,ACC可以有效区分和筛选CIPV,即便在弯道中行驶ACC依然可以正确选择CIPV而不会对相邻车道目标做出错误的反应。ACC系统通常通过CAN总线来与其他系统通信。
ACC系统的主要功能是根据前方车辆状态自适应调节本车速度,该系统主要是根据以下三方面的信息实现:
本车到前方车辆的距离;
本车的运动状态;
驾驶员操作。
基于获得的信息,ACC控制器向执行器发出指令,执行器据此执行纵向控制,ACC还需要将当前状态展示给驾驶员。ACC系统的目标是车辆纵向控制的部分自动化和通过便捷的方式支持并帮助驾驶员以减轻驾驶员的架势负担。ACC系统的基本功能如下图所示:
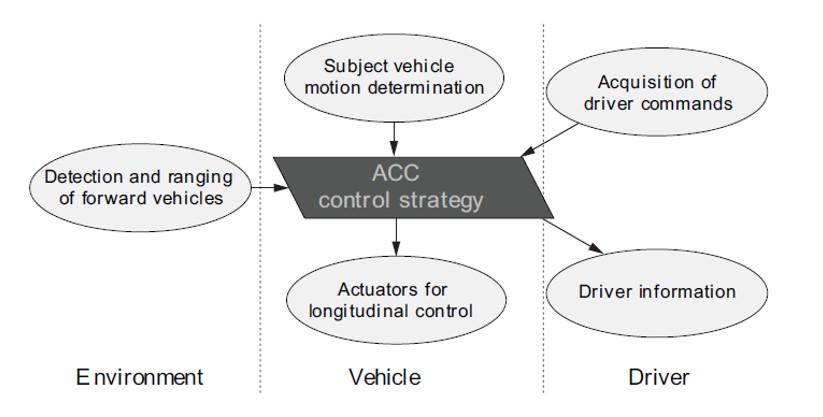
ACC基本功能示意图(ISO15622)
本文介绍了ACC系统概念、操作按键及仪表界面、ACC基本功能框架、基于视觉系统的ACC主要功能等内容,以供读者参考学习。
(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















