



现如今,人们生活节奏越来越快,让人不禁疾呼:时间永远不够用!
于是乎出现了以下种种情景:

开着爱车,化着美妆,打着电话,一路驰骋……
然后……

安全开车,怎么就那么难?
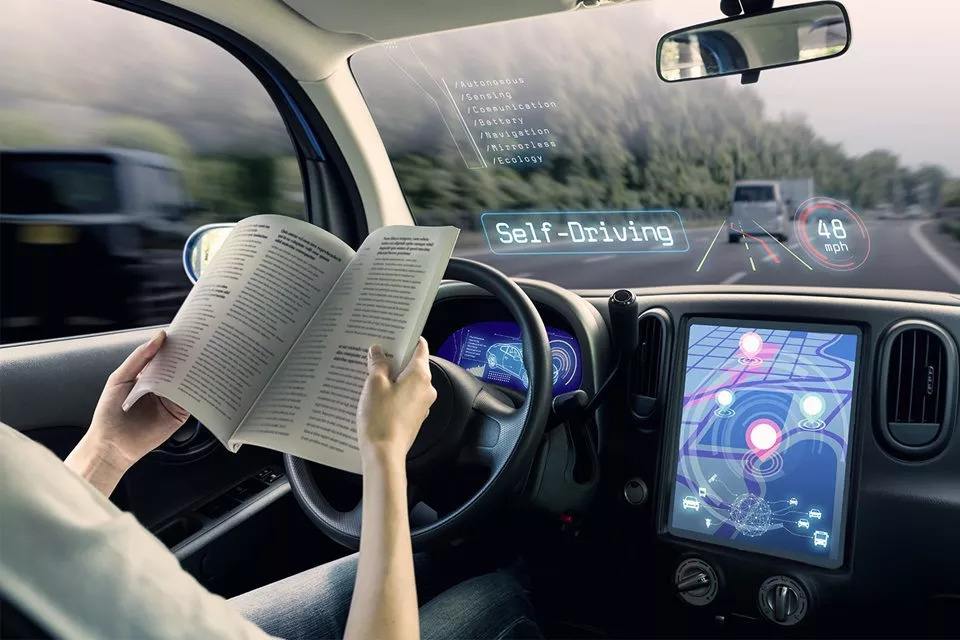
我们都知道,汽车可以按照驾驶员的意愿去运行是因为车上有一系列控制器和执行器。那如何让一辆车在驾驶员注意力开小差或者疲劳时向前安全行驶呢?
正如驾驶员控制油门和刹车踏板来控制车速,用方向盘来控制车辆运行方向,自适应巡航ACC可以根据车辆行驶方向的交通情况在纵向上自动控制车辆的加速与减速,并减轻驾驶员的操作负担。当前方无车辆或前方车辆距离较远时ACC可以按照驾驶员设定的巡航速度行驶,当前方车辆距离较近时ACC可以根据驾驶员设定的跟车时距自动保持与前方车辆间的相对距离。
ACC系统通过EMS/VCU(发动机管理系统/整车控制器)和ESP(i-booster)控制车辆:
加速:ACC系统通过EMS/VCU来控制车辆加速;

减速(较小):ACC系统通过发动机反拖(电机反拖能量回收)来控制车辆减速;

减速(较大):ACC系统通过ESP减速来控制车辆减速;
ACC系统是如何“看”路上车辆和障碍物的?
ACC系统通过车载传感器来感知交通情况,常用的“传感器”包括:摄像头、毫米波雷达等;
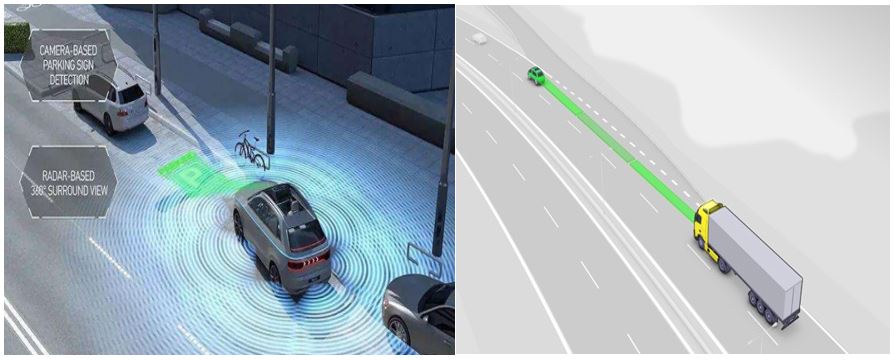
摄像头:自适应巡航ACC系统可通过智能驾驶摄像头来感知车辆前方的交通状况,测量与障碍物间的相对距离、相对速度等;摄像头对障碍物的类型识别方面具有很好的优势,但对光线、雨水、雾霾、沙尘暴等天气条件敏感,测距精度相比较与毫米波雷达要差一些。
毫米波雷达:自适应巡航ACC系统可通过毫米波雷达来感知前方的交通状况,测量与障碍物间的相对距离、相对速度等;毫米波雷达对光线、雨水、雾霾、沙尘暴等天气条件不敏感,可在恶劣天气条件下正常工作,测距精度相对更高,可对障碍物类别不敏感,无法识别障碍物颜色等。
摄像头+毫米波融合是否是正确答案?
的确,摄像头与毫米波融合解决方案会比单一传感器解决方案更“靠谱”些,可也不是万能的“千里眼万里耳”。
技术在发展,没有最好的只有更好的……
既然自适应巡航ACC能稳定跟车又能加减速,那是否是可以完全保障安全?是否为“无人驾驶”?是否可以边开车边玩手机?是否可以开着车哼着歌化着妆?


(END)





 写留言
写留言
 收藏
收藏
 微博分享
微博分享
 微信
微信
 朋友圈
朋友圈
 QQ
QQ
 微博
微博
 QQ空间
QQ空间
 复制链接
复制链接





















